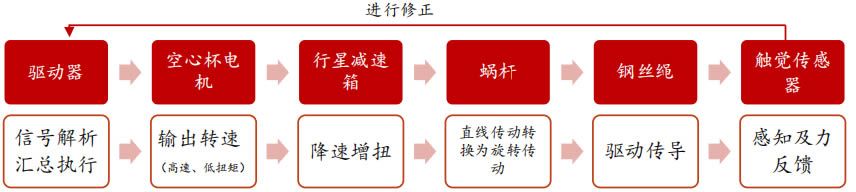
–˝ÞD(zhu®£n)àÃ(zh®™)––∆˜∑÷≤º”⁄ºÁ≤ø��°¢ ÷≤øµ»∂ý◊‘”…∂»ÍP(gu®°n)πù(ji®¶)�£¨◊˜”√ «å¢ƒ≥ŒÔ–˝ÞD(zhu®£n)µΩ“ª∂®Ω«∂»ÕÍ≥…–˝ÞD(zhu®£n)þ\Ñ”;Úå(q®±)Ñ”ÍP(gu®°n)πù(ji®¶)ÕÍ≥…–˝ÞD(zhu®£n)Ñ”◊˜£¨úpÀŸ∆˜ûÈ∫À–ƒ≤øº˛
æÄ–‘àÃ(zh®™)––∆˜Œª”⁄œ•÷‚µ»ÜŒ◊‘”…∂»º∞ÕÛı◊µ»Îp◊‘”…∂»ÍP(gu®°n)πù(ji®¶)£¨å¢ÎäôC–˝ÞD(zhu®£n)þ\Ñ”ÞD(zhu®£n)ûÈ÷±æÄþ\Ñ”;◊É–˝ÞD(zhu®£n)þ\Ñ”ûÈ÷±æÄþ\Ñ”��£¨–––«ùL÷˘Ωz∏ÐûÈ∫À–ƒ≤øº˛
»À–ŒôC∆˜»À∏–÷™œµΩy(t®Øng)≥…±æ’º±»7.3%,àÃ(zh®™)––œµΩy(t®Øng)≥…±æ’º±»53.2%;æÄ–‘àÃ(zh®™)––∆˜≥…±æ’º±»31.0%;–˝ÞD(zhu®£n)àÃ(zh®™)––∆˜≥…±æ’º±»17.9%;∆‰À˚≥…±æ’º±»39.5%
àÃ(zh®™)––œµΩy(t®Øng)BOM’º±»◊Ó∏þ�£¨ºs53.2%£®∆‰÷–÷±æÄ°¢–˝ÞD(zhu®£n)�°¢ ÷≤ø∑÷Ñe ’º31.0%°¢17.9%�����°¢4.3%£©�����£ª∏–÷™œµΩy(t®Øng)’º7.3%�£¨∆‰À˚–æ∆¨°¢Îä≥ÿµ»≤øº˛∫œ”ã’º±»39.5%
á¯∑¿ø∆ºº¥ÛåW(xu®¶)Blackman;π˛ÝñûIπ§òI(y®®)¥ÛåW(xu®¶)HIT Humanoid; ¿Ìπ§ÖRÕØ;’„Ω≠¥ÛåW(xu®¶)ŒÚø’;Éû(y®≠u)±ÿþxWalkerX�°¢Éû(y®≠u)”∆;–°˘i∆˚ÐáPX5;þ_ÍYø∆ººXR-4;±±æ©‰ìËFÇb
»´«Úø’–ƒ±≠ –àˆ“é(gu®©)ƒ£èƒ2021ƒÍµƒ6.75É|√¿‘™‘ˆÈL÷¡2025ƒÍµƒ9.36É|‘™£¨CAGRûÈ8.52%���°£2021ƒÍ»´«Úø’–ƒ±≠ÎäôC –àˆ“é(gu®©)ƒ£ÉH’ºŒ¢ÃÿÎäôCµƒ1.73%
ÃÿÀπ¿≠µƒÕ‚”^壿˚»´≤ø”––ß�£¨«“÷˜“™ºØ÷–‘⁄»’±æ£®4 º˛£©∫ÕöW÷Þ£®1 º˛£©,∆‰À˚“—…͒ൃ∑Ω∑®Óê�����°¢ΩY(ji®¶)òã(g®∞u)Óê壿˚ø…ƒÐ…–Œ¥π´È_
ºº–g(sh®¥)Æî«∞∞l(f®°)’πÎA∂Œº∞⁄ÖÑð£∫÷∏≥ˆºº–g(sh®¥)þM»Î∑Ä(w®ßn)∂®∞l(f®°)’πÎA∂Œ����£¨±æÛwΩY(ji®¶)òã(g®∞u)�°¢÷«ƒÐ∏–÷™°¢þ\Ñ”øÿ÷∆ «ü·¸c;÷π©¡À嶻À–ŒôC∆˜»Àºº–g(sh®¥)∞l(f®°)’π�°¢Æa(ch®£n)òI(y®®)≤ºæ÷°¢ –àˆ⁄ÖÑð∫ÕŒ¥ÅÌ∑ΩœÚµƒ…ӻΓäΩ‚
∆§ƒwµƒ∂ýƒ£ëB(t®§i)∏–÷™ûÈŒ“ÇÉ∏– Ð’Êå絃ŒÔ¿Ì ¿ΩÁ÷π©¡À÷ÿ“™µƒπ§æþ,ôC∆˜»À±„ƒÐ∏–÷™µΩŒÔ∆∑µƒ¥÷≤⁄∂»,∏Ùø’∑˜þ^Œª÷√ŒÔ∆∑ïr���£¨À¸…ı÷¡ƒÐœÒX…‰æÄ∫Õ3Díþ√ËÉxƒ«ò”∏–÷™µΩŒÔ∆∑µƒ≤ƒŸ|(zh®¨)∫Õ–ŒÝÓ
Œ¥ÅÌ‘∆∂ÀåçÚû “ø…“‘±ªΩ®‘O(sh®®)‘⁄ôÍñƒÐ/ÔL(f®•ng)ƒÐ≥‰◊„µƒªƒƒÆ÷–�����£¨ø∆—–»ÀÜTø…“‘胻´ ¿ΩÁ»Œ“‚“ªÇĵÿ∑Ωøÿ÷∆‘∆∂ÀåçÚû “����°£à@Ö^(q®±)É»(n®®i)µƒÉ…¥Û÷˜Ûw°™°™îµ(sh®¥)ì˛(j®¥)¡˜∫Ռԟ|(zh®¨)¡˜����£¨å¢∑÷Ñe”…ª•¬ì(li®¢n)µƒAIæW(w®£ng)Ωj(lu®∞)∫ÕôC∆˜»ÀæW(w®£ng)Ωj(lu®∞)ÿìÿü(z®¶)þ\ðd
ƒzÛwôC∆˜»À£®CR£© «◊‘÷˜Ów¡£ôC∆˜���£¨‘⁄ƒzÛwólº˛œ¬≤…”√°∞∏–”X-”ãÑù-––Ñ”°±∑∂ Ω£¨ƒøòÀ «å¢Œ¢”^ôC∆˜»ÀœµΩy(t®Øng)≤ø µΩ–¬≠h(hu®¢n)æ≥÷–��°£þ@∑N≠h(hu®¢n)æ≥÷–µƒ◊‘÷˜–‘±ª∂®¡xûÈôC∆˜‘⁄õ]”–Õ‚≤øÚå(q®±)Ñ”∫Õ±O(ji®°n)∂Ωµƒ«Èõrœ¬◊ˆ≥ˆõQ≤þ£®ªÚ°∞”ãÀ„°±£©µƒƒÐ¡¶
å¢ú ¥_µƒ 3D é◊∫ŒàD–Œ≈cÅÌ◊‘ 2D ª˘µA(ch®≥)ƒ£–ÕµƒÿS∏ª’Z¡xΩY(ji®¶)∫œ∆ÅÌ���£¨◊åôC∆˜»ÀƒÐâÚ¿˚”√ 2D ª˘µA(ch®≥)ƒ£–Õ÷–ÿS∏ªµƒ“ï”X∫Õ’Z—‘œ»Úû����£¨ÕÍ≥…’Z—‘÷∏åß(d®£o)µƒ≤Ÿ◊˜